
Danyang Li
My research focused on the intersection of robotics, formal methods and machine learning. I am particularly interested in formal verification of neural networks applied to autonomous robotic systems. I am currently working on the combination of machine learning technique and formal methods, i.e., temporal logic, to provide safe and interpretable control algorithm to autonomous system.
TLINet: Differentiable Neural Network Temporal Logic Inference
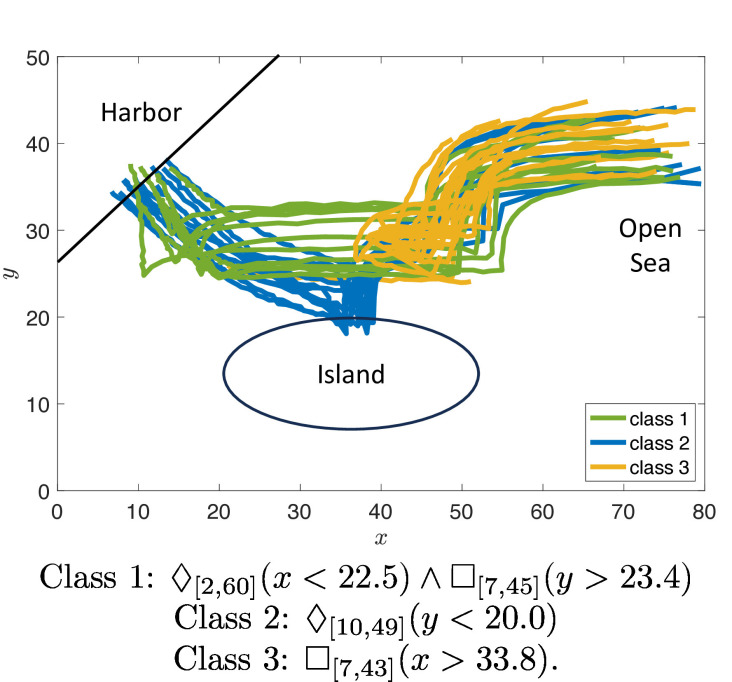
There has been a growing interest in extracting formal descriptions of system behaviors from data. In this work, we specifically focus on the Temporal Logic Inference problem. The goal is to learn Signal Temporal Logic (STL) formulas from time-series data that describes the spatial-temporal properties of data.
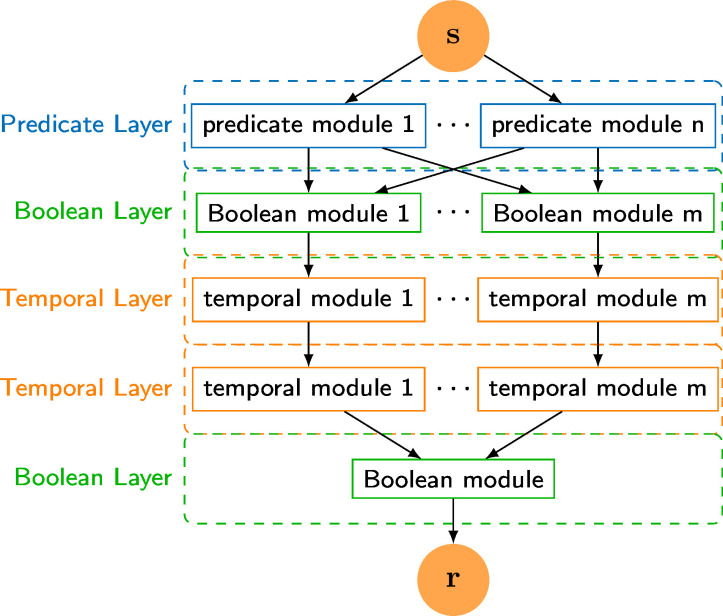
We propose TLINet, a neural-symbolic framework for learning STL formulas. The computation in TLINet is differentiable, enabling the usage of off-the-shelf gradient-based tools during the learning process. In contrast to existing approaches, we introduce approximation methods for max operator designed specifically for temporal logic-based gradient techniques, ensuring the correctness of STL satisfaction evaluation. Our framework not only learns the structure but also the parameters of STL formulas, allowing flexible combinations of operators and various logical structures.
This framework bridges the gap between machine learning and control theory, providing a powerful tool for designing intelligent and interpretable automation systems.
Interpretable Generative Adversarial Imitation Learning
Imitation learning methods have demonstrated considerable success in teaching autonomous systems complex tasks through expert demonstrations. However, a limitation of these methods is their lack of interpretability, particularly in understanding the specific task the learning agent aims to accomplish. In this work, we propose a novel imitation learning method that combines Signal Temporal Logic (STL) inference and control synthesis, enabling the explicit representation of the task as an STL formula. This approach not only provides a clear understanding of the task but also allows for the incorporation of human knowledge and adaptation to new scenarios through manual adjustments of the STL formulas. We employ a Generative Adversarial Network (GAN)-inspired approach to train both the inference and policy networks, effectively narrowing the gap between the expert and learned policies.



Sequential Planning Method for Autonomous Air Traffic Control
Ensuring safe planning and control for multi-drone systems across various missions is a critical challenge. The Fly-by-Logic approach addresses this by encoding mission requirements into a mathematical framework. This framework enables controllers to generate continuous-time trajectories for quadrotors, ensuring precise and reliable operation.
In this work, I developed a sequential planning method that provides a practical solution for commercial applications. This method not only safeguards privacy information but also maintains strong safety guarantees, making it well-suited for real-world deployment in autonomous air traffic control systems.

Noise in CVD Graphene Gas Sensors
During my undergraduate studies, I contributed to reporting a bandwidth-enhanced sensing scheme for gas sensors utilizing graphene field-effect transistors (GFETs). This research earned the Best Undergraduate Student Thesis Award at Beihang University.